


Published on Apr 07, 2026
Human body is perfect combination of motion, balance, co-ordination and reflex. It because human brain is so much developed that all these activities can take place in such perfect co-ordination. With advancement in science we humans have created many beautiful creations and robot happens to be one of them. Humans have developed robots that can mimic humans. In the same context it is our humble effort to develop an electro-mechanical autonomous robotic vehicle that can have multiple degree of freedom, which enable it to move through various terrains.
Taking inspiration from NASA’s path finder robot we have tried to make a tone down prototype which control its movement with help of microcontroller which properly co-ordinate its motion.
In our project we have tried to built an electro-mechanical autonomous robotic vehicle, which moves over the hurdles in front of it by sensing obstacle with help of sensing circuit and taking controlled action with microcontroller ,which drives the motors to make robot climb over the obstruction.
We have used many other chips to achieve this motion which we have described in the component section. This robotic vehicle could become a prototype for surveillance vehicle and other military vehicles used for detection and detonation of mines .Since cost of this prototype is very less thus it could be inducted in army easily and be made indigenously.Mainly ou project is based on working of microcontroller for the automatic management and motors for hardware management.
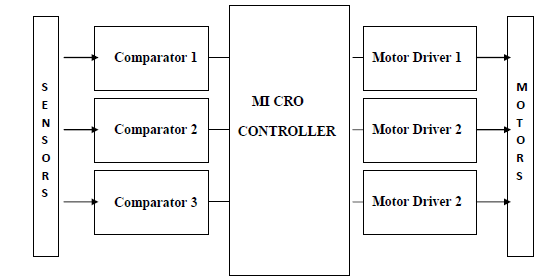
At initial position all the wheels are on the ground and microcontroller is programmed in such a way that the robo moves forward till the sensor circuit detect any obstruction. The sensor circuit consist of IR LED and phototransistor .The IR LED emits the IR radiations ,when there no obstruction the phototransistor does not detect any reflected radiation and the vehicle moves forward without any vertical motion.
When any obstruction comes in front of sensor mounted in front of wheel one the IR radiation are reflected back from the obstruction which is picked up by phototransistor .This phototransistor supplies a trigger signal to the comparator which conditions the signal and supplies the signal to microcontroller. The forward motion of the robo stops and microcontroller then detect the signal on a programmed pin. According to programming controller send the signal to the motor driver .
The motor driver drives the rack and pinion which lifts the wheel set one from the ground. The phototransistor detect the radiated IR radiations till the IR LED moves above the obstacle. As the wheels thus IR LED moves above the obstruction no sensor detect any signal thus forward motion of robo is initiated by the controller. Now the second detector detect the obstruction and same action is repeated as in case of first sensor.
Once the second wheel moves over the obstruction the center of gravity moves in such a position that roo cannot topple. Thus in similar way third and last wheel climb over the obstruction and the robo moves above the obstruction.
