

Published on Apr 07, 2026
Handling is the key feature that most of the people look for in their automobiles. This led to the development of “Four Wheel Steering" concept. It is a system that allows the rear wheel to turn, rather than following the front wheels. The steering box contains constant mesh spur gears which allows the driver to pick up any steering ratio according to his necessity. The concept of four wheel steering allows the driver to decrease the turning radius, so that the vehicle can take small turns.
The reason for the system not being implemented in the commercial vehicle was its expensiveness. The main aim of this paper is to turn the rear wheels out of the phase. In order to achieve this, a system of constant mesh gearbox is used which transmits a 100% torque and will assist the rear wheels to turn in the phase or out of the phase.
In order to increase the performance, stability and the driving pleasure, some improvements are achieved using technologies such as active-suspension, anti-lock braking system, traction control system, electric steering system and the Four Wheel Active Steering System. Of the above mentioned topics, four wheels active steering system will be discussed. Theoretical research has been done by various researchers and quiet progressive ideas have been introduced but the current device has problem which needs to be solved.
To understand this system clearly, a general idea and an application of constant mesh gear box with involute tooth profile of spur gear is required. Because of the present circumstances, this paper focuses only on the design of the four wheel steering. Here, the Creo Parametric 2.0 is used to design the basic model on the computer. Firstly, out of the cars currently in the production, a basic model was used to study the Rack and pinion steering, it is then applied to the rear wheels. This paper focuses on the mechanical feasibility and the innovative design involving a rack and pinion system for rear wheels connected to the steering column by a combination of spur gear assembly. The movement of the rear wheels is done by the movement of rear pinion, which in turn moves the rear wheels.
Vehicle performance in turning can be enhanced by actively steering the rear wheels as well as front wheels (4WS). Active steering is accomplished by the steering action applied directly to the rear wheels, in contrast to, Passive steering in which compliances are purposely designed into suspension to provide incremental steer deviation that improves cornering. Four wheel steering may be used to improve low speed manoeuvrability and/or high speed manoeuvrability.
The four wheel steering consist of the following components:-
Rack and pinion
Input Shaft
Output shaft
Rack stabilising unit
Constant mesh gearbox
Gear lever
Spur gears are the gears in which the teeth are cut parallel to the axis of the shaft. Spur gears are used only when the shafts are parallel. The profile of the gear tooth is in the shape of involute curve and it remains identical along the entire width of the gear wheel. Spur gears impose radial loads on the shafts.
Spur rack is a special case of spur gear where it is made of infinite diameter so that the pitch surface is plane. The spur rack and pinion combination converts the rotary motion into translatory motion, or vice-versa. It is used to convert the rotation of steering wheel into left-to-right motion of the tie rod(s).
A constant mesh gearbox is used to alter the rotational speed and torque that the front pinion delivers to the rear wheel of the vehicle. It uses different arrangements of the gear to achieve different turning ratios. The different rotational speeds, in this transmission, is made by shifting toothed cone clutches rather than the individual gears as the gears are always in mesh.
It is a rotating element that transmits the power from front pinion to gear. All the gears mounted on this shaft are free to rotate about their axis.
It is a rotating element that transmits the power from the gear to the rear pinion. All the gears mounted on this shaft are keyed to the shaft.
It is an electronic device that returns the rear rack to its original position, every time, the gear lever passes through the neutral position, in order to maintain the rack in its correct position.
It is the same lever which is used to shift transmission in the gearbox of the engine with some modifications. The lever is extended and connected to the holder which synchronises the gears in the same fashion as that in the engine. If any transmission is changed in the engine, the same will affect the transmission in the gear box which will rotate the gears accordingly. This is done with the help of a linkage mechanism.
The aim of the steering system is to achieve the angular motion of the front wheels to negotiate a turn. With the help of linkage mechanism and steering gear, the rotatory motion of the steering wheel is converted into the angular motion of the front wheels. This mechanism is also applied on the rear rack, which will assist the angular motion of the rear wheels.
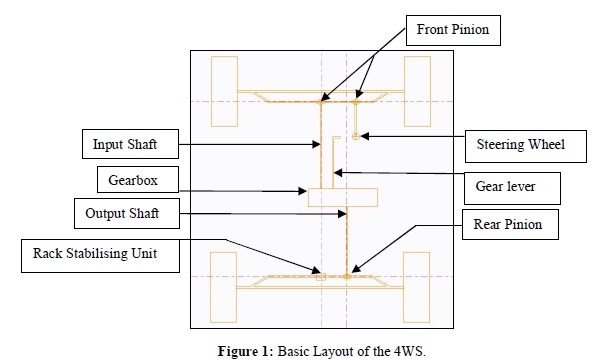
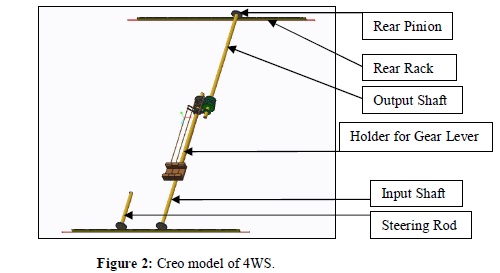
This paper consists of front and rear rack pinion which is assisted by two pinions; one on the front rack and other on the rear rack. When the pinion from the steering wheel turns the rack, the rack in turn, rotates the front pinion. This front pinion is connected to the input shaft. When the lever is pulled and the dog clutch meshes with the free gear mounted on the input shaft. The input gear meshes with the output gear which is keyed to the output shaft. Hence, it provides a rotational speed to the output shaft, which rotates the rear pinion and in turn, rack follows a translatory motion. The gear lever which is used to change the engine torque is modified and is held in the holder which allows the motion of the dog clutch. The main focus of designing the model was to use the front and rear rack at the same time.
The project was carried out to ensure the stability of the vehicle using constant mesh gears. It is helpful to the drivers while taking sharp turns and also while taking a small turn. It reduces the overall turning radius of the vehicle by ensuring that each tie rod plays its part well. This model was made by considering only the smooth road conditions, fluctuations in the road conditions might damage the input as well as the output shaft. Proper lubrication might increase the life span of the assembly. The project has a short coming of synchronising the front rack with the rear rack, if the driver decides to shift the gear while making a turn.
[1] Xiaodong Wu, Differential Speed Steering Control for Four-Wheel Independent Driving Electric Vehicle International Journal of Materials, Mechanics and Manufacturing, Vol. 1, No. 4, November 2013.
[2] S. Nithyanantan, A. Jagateesh, K. Madan, B. Nirmalkumar, Convertible Four Wheels Steering With Three Mode Operation, International Journal Of Research In Aeronautical And Mechanical Engineering, ISSN (Online): 2321-3051.
[3] Arun Singh, Abhishek Kumar, Rajiv Chaudhary, R. C. Singh, Study of 4 Wheel Steering Systems to Reduce Turning Radius and Increase Stability, International Conference of Advance Research and Innovation (ICARI-2014), ISBN 978-93-5156-328-0.
[4] K. Lohith, Dr. S. R. Shankapal, M. H. Monish Gowda, DEVELOPMENT OF FOUR WHEEL STEERING SYSTEM FOR A CAR, SASTECH Journal, Volume 12, Issue 1, April 2013.
