

Published on Apr 07, 2026
The aim of this paper is to develop an alternative solution for conventional two wheel steering system .In modern era, the major characteristics of the vehicle like steer ability and handling have become major aspects.Conventional steering involve either the Ackerman or Davis steering system which has major disadvantage is it can't take minimum radius turn. Providing zero turn steering without any compromise in steer ability and handling of the vehicle is a major concern for automakers. The main intention is to improve the zero turn steer ability of the vehicle without wheel wandering problems.
The number of vehicles are continuously increasing It causes the problem of traffic congestion, pollution (noise and air). To overcome problem like vehicle maneuvering on narrow roads and during parking this system has been proposed. Zero turn steering gives much better maneuverability and control on the car. We have developed an innovative idea about four wheel steering design to implement a mechanism that can take minimum radius turn about its gravitational axis. Zero turning is done by turning drive wheels at the same rate in opposite direction. By steering the rear wheels in the direction opposite the front wheels at low speeds, the vehicles turning circle radius is greatly reduced.
In 21`st century vehicle is the basic need of human being for transportation. The new technologies were developed for the comfort and efficient working of the vehicle.
Steering is the term applied to the collection of linkages, components etc. which will allow a vehicle to follow the desire path .The most conventional system is two wheel steering system .
The purpose of steering is to ensure that the wheels are pointing in the required directions. This is typically achieved by a series of linkages, rods, pivots and gears. One of the basic principle is that of caster angle - each wheel is steered with a pivot point ahead of the wheel; this makes the steering tend to be self-centering in desire direction of travel. We have to consider the fact that in a turn, the inner wheel is actually travelling a path of smaller radius than the outer wheel, due to which the degree of toe appropriate for driving in a straight path is not suitable for turns.
Another thing influence the steering dynamics is angel make by wheels with vertical plane. Modern cars mostly use rack and pinion steering mechanisms, in which steering wheel turns the pinion gear; the pinion moves the rack, which is a linear gear that meshes with the pinion, this mechanism converting circular motion into linear motion along with transverse axis of the car. The steering torque is applied by this motion to the swivel pin ball joints which replaces kingpins used previously of the stub axle of the steered wheels via tie rods and a short lever arm known as the steering arm.
In two wheel steering system the front wheels are turned using a hand operated steering wheel which is positioned ahead of the driver. The common problem regarding two wheel steering system includes problem in at public place, mall, parking, traffic etc.
In four wheel steering system the wheels connected to the front axle are turned opposite to each other and also the wheels connected to the rear axle turn opposite to each other .The wheels on the left half vehicle rotate in one direction and the one on the right half of the vehicle rotate in opposite direction .
Zero turn vehicle takes the sharp turn about a vertical axis passing through its center of gravity .For zero turn vehicle there is no need of additional space .The vehicle rotate in the circle having diameter equal to its length .The requirement of additional space is neglected.This system is used in jeep hurricane, Tata Nano pixel, JCB, lawn mower.
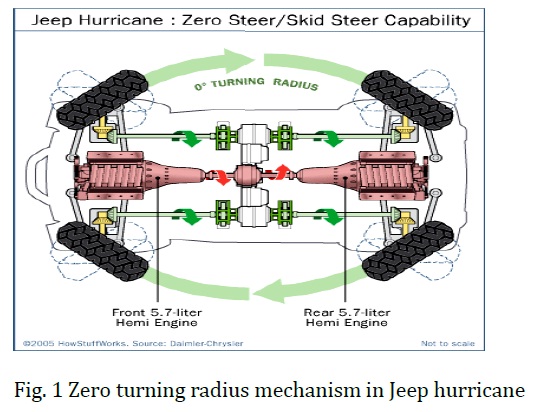
The Jeep Hurricane which has many steering modes using four-wheel independent steering. Each wheel can turn independently from the other. The vehicle has two modes of four wheel steering. In first mode front tires and rear tires turns in opposite direction and reduces the turning circle. In second mode, front and rear wheels turn in same direction for crab steering, which facilitates parking at narrow space without changing the direction .The jeep hurricane can actually rotate in place, as shown in Fig. The Jeep hurricane has some limitations like requirement of skilled driver, complex steering system wear of tire.
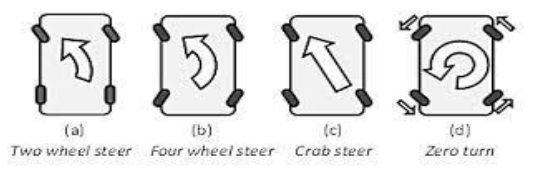
The various types of steering wheel configuration are as follows
Two Wheel Steer: In this mode only one axle is driven.
Four wheel steer: In this both axle are driven but in direction opposite to each other.
Crab steer: When all the wheels turn in same direction it is known as crab steer.
Zero turn steer: In this mode vehicle follows the circular path.
Electric motor is machine which convert electric energy into mechanical energy. Its action is based on the principle that, when a conductor carrying current placed in magnetic field, it experiences a mechanical force whose direction is given by Fleming’s Left Hand Rule
In pneumatic cylinder power of compressed gas is used to produce reciprocating linear motion. Hydraulic cylinders having piston which move in a desire direction and piston rod transfers the force which is developed to the object. Because, the operating fluid is a gas, leakage from the pneumatic cylinder will not drip out and contaminate the surrounding. So it is desirable where cleanliness is required.
Direction control valve are used for distribution of energy to various actuators by controlling the direction of flow of the pressurized oil or gas in the system. Generally DCV controls the fluid flow
Hoses are made completely flexible to carry high pressure compressed air. It can be withstand to high temperature and pressure gasses. It is very flexible and easy to use.
Wheels are the end link of the vehicle which give direct output of the system. They are move on a ground having rubber coating to outer side of the wheel for gripping. It carries whole weight of the vehicle. The system consists of three double acting pneumatic cylinders actuated by Direction Control Valve. Hoses are used to supply compressed air.In between wheels and piston rod of pneumatic cylinders mechanical linkages are arranged. Wheels are driven by side shaft D.C. Gear motor.
It is based on the principle of pneumatic system in which compressed air is used to turn the all wheels of vehicle to turn the vehicle in circular path. Zero turn vehicle means the vehicle which take the sharp turn with zero turning radius and follow exact circular path without leaving its vertical axis passing through the center. The air is pressurized in the compressor. The compressor is used to pressurize the air due to which the temperature of the air increases .This pressurized air is supplied to the actuator through DCV. It controls the path of the air.
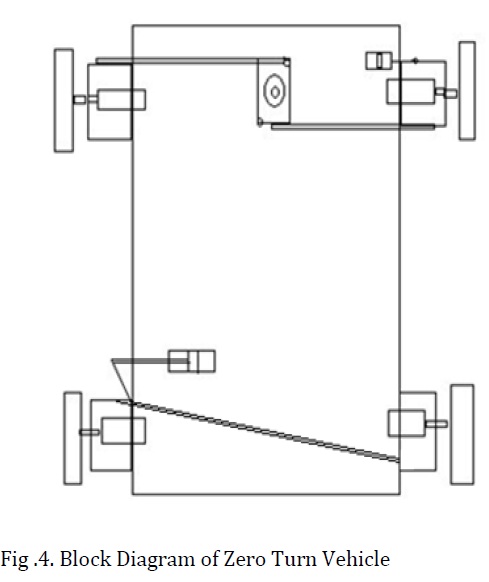
The hoses carry the air between DCV and actuators. The rod of actuator is connected to the wheel through the mechanical linkages. Due to movement of the piston, linkages are also actuated which gives desire movement to the wheels of the vehicle. The dc motors gives the four wheel drive to each wheel. The dc motor can be rotate in both direction like clockwise and anticlockwise which are control by controller. An adapter is used which converts the ac current in dc current and gives to the dc motor. Normal steering system of the vehicle is regulated by dc motor.
When supply of compress air is start, DCV is manually operated to tilt the wheels to take zero turn. At that same time the dc motors are actuated by means of controller and give the drive to the vehicle so that it can take zero turn. When there is no requirement of the zero turn the lever of DCV is put into normal position and vehicle can move as per normal vehicle.
A vehicle containing user friendly steering mechanism and low cost has been introduced.Based on the results of analysis following conclusion are drawn. The vehicle's cornering behavior becomes more stable and controllable at low speeds as well as on wet or slippery road surfaces. The vehicles response to steering input becomes quicker and more precise.The vehicle's straight-line stability is improved during zero turning.By steering the rear wheels in the direction opposite the front wheels at low speeds, the vehicles turning circle radius is greatly reduced .problems like vehicle maneuvering on narrow roads and during parking becomes easier. This system reduce parking and turning time. We can achieve zero turn without any compromise in steer ability and handling of the vehicle.
Shirsath S.V. , Jadhav K.R., Patil R.V. , Mohite A.V., Prof. Patil .D.D.
[1].http://auto.howstuffworks.com/jeep-hurricane
[2]Arun Singh *, Abhishek Kumar, Rajiv Chaudhary, R. C. Singh
[3]Kirpal Singh, “Automobile Engineering”, Standard publishers
[4].Wheel Steering System Md. Danish Akhtar, 2013
