


Published on Aug 21, 2023
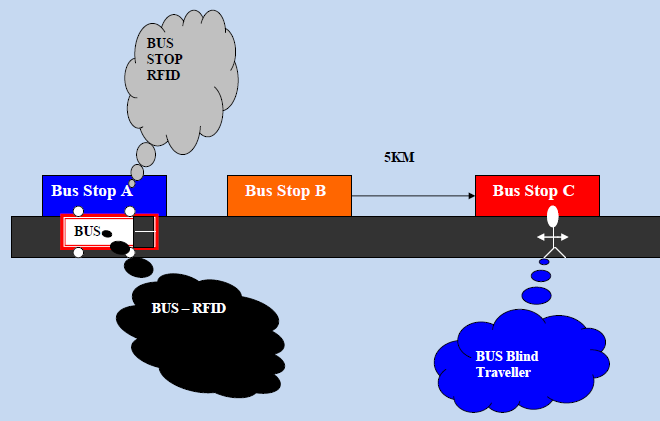
This system is mainly used to find the Bus where the bus is going for Blind people. About 1% of the human population is visually impaired, and amongst them about 10% is fully blind. One of the consequences of being visally impaired is the limitations in mobility.
For global navigation, many tools already exist. For instance, in outdoor situations, handheld GPS systems for the blind are now available. These tools are not helpful for local navigation: local path planning and collision avoidance.
The traditional tools, i.e. the guide dog and the cane, are appreciated tools, but nevertheless hese tools do not adequately solve the local navigation problems.
Guide dogs are not employable at a large scale (the training capacity in the Netherlands is about 100 guide dogs yearly; just enough to help about 1000 users). The cane is too restrictive.
The goal of this research is to develop a wearable tool that assists the blind to accomplish his local sensory system controlled by the user. The primary data needed for local navigation is range data (which is not necessarily obtained from visual data alone; at this point, the type of sensors is still an open question).
The mapper converts the range data into map data. The local map is the input to a warning system that transforms the map data into a form that is suitable for communication. In order to give the blind person freedom of movement, he must be able to control the focus of attention of the sensory system. For that purpose, the tool must be provided with a man-machine interface.
