


Published on Aug 21, 2023
The report details the implementation of distance measurement system using the ultrasonic waves. As the human ear’s audible perception range is 20 Hz to 20 kHz, it is insensitive to ultrasonic waves, and hence the ultrasound waves can be used for applications in industries/vehicles without hindering human activity. They are widely used as range meters and proximity detectors in industries also it can be used in parking assistance system. The distance can be measured using pulse echo and phase measurement method. Here the pulse echo method is used.
The measurement unit uses a continuous signal in the transmission frequency range of ultrasonic transducers. The signal is transmitted by an ultrasonic transducer, reflected by an obstacle and received by another transducer where the signal is detected. The time delay of the transmitted and the received signal corresponds to the distance between the system and the obstacle.
The techniques of distance measurement using ultrasonic in air include continuous wave and pulse echo technique. In the pulse echo method, a burst of pulses is sent through the transmission medium and is reflected by an object kept at specified distance. The time taken for the pulse to propagate from transmitter to receiver is proportional to the distance of object.
For contact less measurement of distance, the device has to rely on the target to reflect the pulse back to itself. The target needs to have a proper orientation that is it needs to be perpendicular to the direction of propagation of the pulses. The amlitude of the received signal gets significantly attenuated and is a function of nature of the medium and the distance between the transmitter and target. The pulse echo or time-of-flight method of range measurement is subject to high levels of signal attenuation when used in an air medium, thus limiting its distance range.
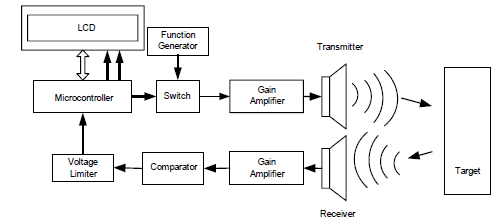
The circuit has been divided into two divisions.
(i) Digital section- micro controller and LCD display unit with 5volt power supply
(ii) Analog section –
(a) Transmitting side - Ultrasonic transducers, gain amplifier using uA741 CD4066 CMOS analog switch.
(b) Receiving side - TL084 comparator, gain amplifier, voltage limiter.
(c) +15V and -15V power supply.
The time of flight method is used for finding the distance between the transmitter and the object. The transmitter sends out a burst of pulses and a receiver detects the reflected echo. The time delay between the corresponding edges of the transmitted and received pulses is measured by microcontroller, this gives the time of flight. Substituting the time delay and the velocity of ultrasound in air (330 metres/second) in the following formula we can determine the distance between the transmitter and the target. Fig.2 shows the transmitted and received pulses.
Distance = Velocity X Elapsed time
