


Published on Apr 07, 2026
This project aims at designing control system for a robot such that the unmanned vehicle is controlled using PC and wireless RF communication. In this project the controlling is done depending on the feedback provided by the IR sensor, which is the part of objectdetection circuit.
The project contains different modules such as
Object detection and angle determination in the path using IR sensor.
Obstacle avoidance and enemy detection.
Design of RF circuits for data transfer.
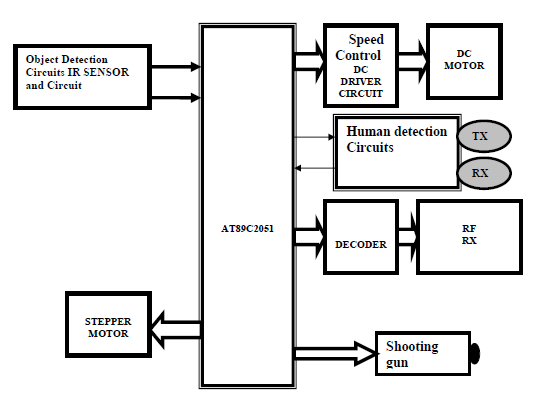
In the object detection module when the AT89c2051 micro controller is powered up the stepper motor starts rotating at 360-degree arc. The IR sensor is mounted on stepper motor. When an object is detected by the IR sensor the microcontroller stops the robot and stepper motor. The IR sensor consists of IR transmitter and receiver .the IR transmitter is a led and receiver is detected the object and receive the IR pulse. Here the frequency used is 38 kHz.
The angle detected is sent to PC using RF communication. The rotation of each step is calculated in to each step. From PC keyboard to control the speed, left and right control key value is sending through Serial port. The serial port is connected into RF Encoder circuits and RF Transmitter.
The data transmission is happened in 4-bit communication. PC key entering value is sending to RF. The value will receive into the RX-RF and compare of each value and control all steps. But IR it will work under object detection and controller will shoot . In the RF circuit design two pairs of RF transmitter and receiver are used. One set is used for communication between AT89c2051 micro controllers.
1) Military (Army)
2) Industrial Automation
1) Moving Object Detection of Enemy and Obstacle.
2) Auto Detect and Shooting
3) Angle Detection
4) Speed Control
5) RFID for Enemy detection
6) Compact Vehicle
7) Real Time mode.
1) Image Process of Enemy detection
2) Path finding and Tracking
