

Published on Apr 07, 2026
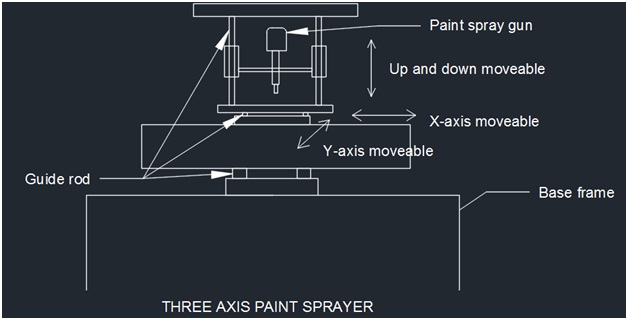
This project deals with the fabrication of paint spraying robot. The aim of this project work is to acquire practical knowledge in the field of complicated three axis painting with the help of motor. The project work is concerned with the fabrication of the portable motorized crane. This machine is very useful for lifting and carrying heavy loads such as painting equipment, painting person and etc.
The very essence of our economic life and growth is dependent in a great part upon the continued improvement and development of the electronic and mechanical fields. To aid these fields, we have FABRICATION OF THREE AXIS PAINT SPRAYING ROBOT, Mechanical type, which can be widely used to lift the less weight or heavy weigh work pieces and etc. Extreme care should be taken while lifting the load in the jib crane layout.
Before starting any project, its planning is done; planning is a very important task and should be taken up and down with going to the base on X, Y direction great care, as the efficiency of the whole project depends largely upon the planning. While planning the project each and every detail should be worked out in anticipation and all the relative provisions should be carefully considered in advance. Project planning consists of the following steps.
Having been decided about the project to be manufactured, it must be designed. The work of the design should be done very carefully considering all the relevant factors. After designing the project, its detailed drawings are prepared so that no doubts are left for future. Detailed specifications of the raw materials and finished products should be decided carefully along with the specifications of the machine required for their manufacture. This project work is designed by considering all the particle difficulties while fabricating, in advance.
Next work of planning is to select the best method of manufacture, so that wastage of raw material, idle time of the man and machinery and total manufacture time are restricted. Machine tools required to do the jobs are considered, while planning the operation. After considering the above questions, best method is developed and applied.
That is project contain to the totally two D.C motor will be attached, One is up and down motion using and another one is X, Y direction moving motion control.
This is should be connecting on two motor connecting controller board that operating button model remote control.
-Because of high speed and pressure capabilities they have a very small weight to power output ratio.
-Losses are minimum due to less number of moving parts and so gives expected performance.
-Due to elegant and simple control systems, it does silent operation and no vibration is produced.
4. Longer life
5. Flexibility
6. Efficient and dependable.
7. Simple installation.
8. Easy maintenance.
