

Published on Apr 07, 2026
Rovers will continue to play an important role in planetary exploration. Plans include the use of the rocker-bogie rover configuration. Here, models of the mechanics of this configuration are presented.
Methods for solving the inverse kinematics of the system and quasi-static force analysis are described. Also described is a simulation based on the models of the rover’s performance. Experimental results confirm the validity of the models.
NASA recently started an ambitious exploration program of Mars. Pathfinder is the first rover explorer in this program. Future rovers will need to travel several kilometers over periods of months and manipulate rock and soil samples. They will also need to be somewhat autonomous. Rocker-bogie based rovers are likely candidates for these missions. The physics of these rovers is quite complex.
To design and control these, analytical models of how the rover interacts with its environment are essential. Models are also needed for rover action planning. Simple mobility analysis of rocker-bogie vehicles have been developed and used for design evaluation. In the available published works, the rocker-bogie configuration is modeled as a planar system.
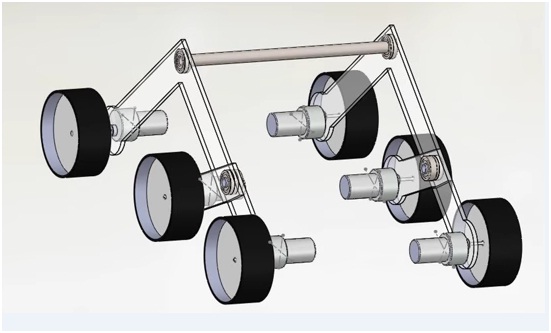
Along with the Sojourner rover, the representative of a class of prototype planetary rovers based on a rocker-bogie mobility configuration. The vehicle has 20 cm diameter wheels and is approximately 100 cm in length, 70 cm wide, and 45 cm high. It is equipped with a three degrees of freedom manipulator, whose payload is not negligible in the rover mass distribution. Six independently driven wheels are mounted on an articulated frame. The frame has two rocker arms connected to a main body. Each rocker has a rear wheel connected to one end and a secondary rocker, called a bogie, connected to the other. At each end of the bogie is a drive wheel and the bogie is connected to the rocker with a free pivoting joint. The rockers are connected to the main body with a differential so that the pitch angle of the body is the average of the pitch angles of the rockers.
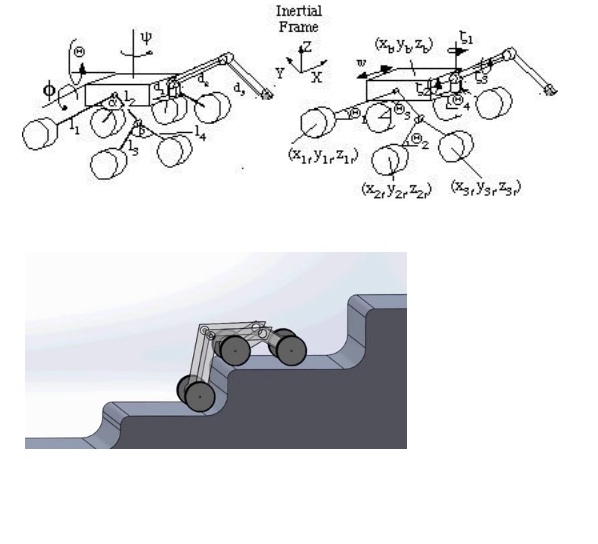
The attitude and configuration of a rover as a function of the terrain on which it moves is required to calculate the load distribution on the wheels, the rover’s stability, actuator outputs, etc. The rover’s configuration, position and attitude can be fully defined by the following ten parameters
