

Published on Apr 07, 2026
This project presents the concept of Multi-Function Operating Robot mainly carried out for production based industries. Industries are basically meant for Production of useful goods and services at low production cost, machinery cost and low inventory cost. Today in this world every task has been made quicker and fast due to technology advancement but this advancement also demands huge investments and expenditure, every industry desires to make high productivity rate maintaining the quality and standard of the product at low average cost.
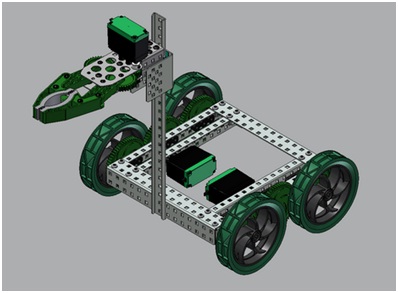
We have developed a conceptual model of a robot which would be capable of performing different operation simultaneously, and it should be economically efficient. In this robot we are actually giving drive to the main shaft to which chain drive mechanism is directly attached. The model facilitates us to get the operation performed at different working Centre simultaneously as it is getting drive from single power source. Objective of this model are conservation of electricity (power supply), reduction in cost associated with power usage, increase in productivity, reduced floor space.
In the conceptual model of “Multi-Functional operating machine” we are giving supply to the main shaft, as we move along the axis of shaft we have mounted a spur gear arrangement. A chain sprocket mechanism is used for the horizontal motion of the paint sprayer The wheels of the robot are designed in such a way that makes staircase climbing possible for our constructed machine.
The IR sensor that is placed at the front end is used to detect any obstacles that cross the path of the robot and proceeds only after the obstacle has moved away from the path of the machine. A paint sprayer is attached to a sprocket and chain drive which provides the horizontal directional motion for the paint sprayer.

• Staircase climbing is possible hence separate manpower is not required for painting walls adjacent to the staircase.
• It has an anti-collision construction hence there will be no physical damage to the robotnor the surroundings.
• No man power is required.
• Time saving with a uniform painting output.
• Painting at risky areas where there is no proper access to human being.
• Painting at staircase regions.
• Can be used to work even in crowded areas as obstacle avoidance is possible.
