

Published on Apr 07, 2026
Torque vectoring is a new technology being employed in automobile differentials. A differential is used to transfer engine torque to the wheels. Torque vectoring technology provides the differential with the ability to vary the amount of power sent to each wheel. This method of power transfer has recently become very popular in all-wheel drive vehicles. A basic torque vectoring differential can be found on some newer front-wheel drive vehicles as well. As technology in the automotive industry improves, more and more vehicles are being equipped with torque vectoring differentials.
Torque vectoring is the next step in AWD, its contribution being that it can get power to any wheel nearly instantly without having to use the brakes or cut power. Most current AWD control wheel is spin by breaking a spinning wheel or cutting the power from the engine. Torque vectoring is achieved by using redesigned differentials that can distribute power to the wheel or wheels that have traction. That means that wheels don't need to be stopped, and even better, you won't suffer from a sudden loss of power as you're negotiating an unexpected loss in traction. Some systems in use now or being developed work on FWD, RWD, and AWD cars, and can get power to any wheel or combination of wheels.
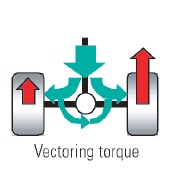
The lateral torque vectoring control transfers the torque from the left wheel to the right wheel, and vice versa, to generate an amount of braking torque on one wheel while generating the same amount of driving torque on the other wheel. The control of this type, therefore, can generate the yaw moment at any time regardless of the engine torque. Another advantage is that it does not affect the total driving and braking forces acting on the vehicle: no conflict with acceleration and deceleration operations. Although this control affects the steering reaction force when applied to the front wheels, it does not produce any adverse effects when applied to the rear wheels.
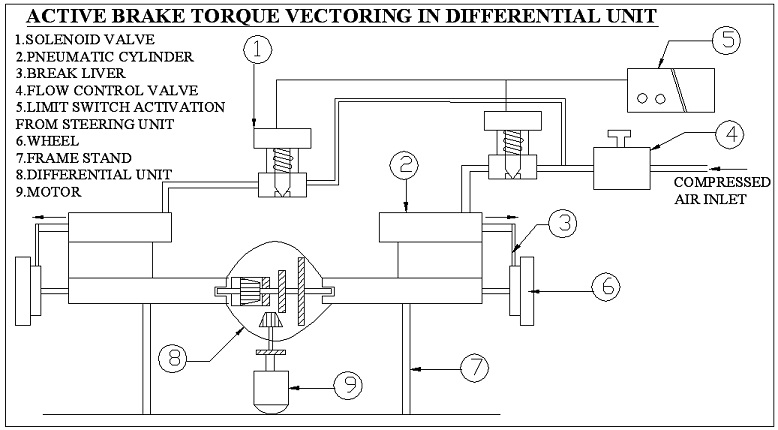
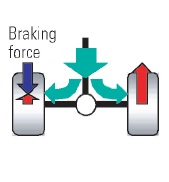
The lateral braking control applies different braking forces to the four wheels independently so as to produce a difference in braking force between the left and right wheels, which generates the yaw moment. As this control uses braking forces, it feels to the driver like deceleration, but the control is effective because it can generate yaw moment under a wide range of conditions of vehicle operation.
Unlike passive EDL which applies the brakes to the wheel where it senses slippage, this is an active torque distribution where the torque is sent to the outside wheel to improve turn in.
Torque transfer is limited to 50%.
Easy turning
Less Manual force is required to locking the differential unit
This pneumatic system is also working with the help of air tank
Time consumption is less
More efficient system and simple in construction
All Four wheeler application
High Initial cost.
Additional space required for modification
