

Published on Apr 07, 2026
Although robot navigation in indoor environments has achieved great success, robots are unable to fully navigate these spaces without the ability to operate elevators, including those which the robot has not seen before. In this paper, we focus on the key challenge of autonomous interaction with an unknown elevator button panel. A number of factors, such as lack of useful 3D features, variety of elevator panel designs, variation in lighting conditions, and small size of elevator buttons, render this goal quite difficult.
To address the task of detecting, localizing, and labelling the buttons, we use state-of-the-art vision algorithms along with machine learning techniques to take advantage of contextual features. To verify our approach, we collected a dataset of 150 pictures of elevator panels from more than 60 distinct elevators, and performed extensive offline testing. On this very diverse dataset, our algorithm succeeded in correctly localizing and labelling 86.2% of the buttons.
Using a mobile robot platform, we then validate our algorithms in experiments where, using only its on-board sensors, the robot autonomously interprets the panel and presses the appropriate button in elevators never seen before by the robot
Robots have been able to autonomously navigate unknown building floors for some time; however, their mobility in these general environments is restricted if they are not capable of autonomously operating elevators. Current robot systems (used in environments such as hospitals and labs) either rely on human assistance or use infrared transmitters to interact with an elevator.
Relying on human assistance can be inefficient and one can imagine a situation where it might be impossible, e.g. a robot janitor cleaning a building after working hours. Retrofitting all elevators with infrared detectors could be costly and time-consuming and may not be possible if robots must be able to navigate in a large number of different buildings. In this paper, we consider the challenge of enabling a mobile robot to autonomously operate elevators (with no human intervention), including those never before seen by the robot.
We focus on developing algorithms to enable a robot to identify and accurately localize buttons and recognize their labels, and execute the action of pressing the button corresponding to the desired floor. Interior button panels since call buttons usually consist of only up/down buttons and represent a constrained special case of general elevator panels.
Generally, elevator is used to lift the heavy materials. This is the era of robotics so we implement our new project model automatically operated robotic elevator. Normally we all heard about four axes and six axis robot which is handling equipment’s in different axis.
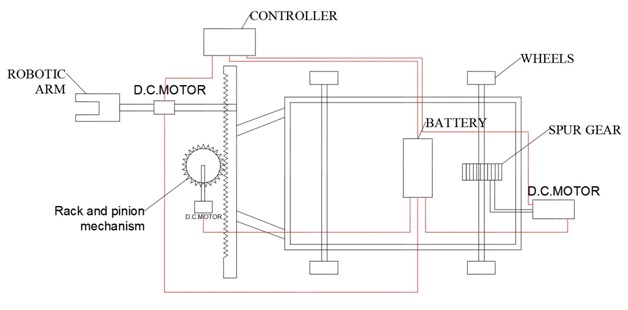
Robotic elevator consists of two D.C motors, one is for drive the wheel in fro and back direction and another is to lift the arm of the robot. Here we use toggle switch for control the movement of the motors.
Rack and Pinion mechanism setup in front wheel is used to lift the materials. We know rack and pinion setup is used to convert linear motion to vertical and vice-versa. We use D.C battery to provide current to the motors. In robotic arm we fix the D.C motor of 100 rpm for opening and closing of robot arm.
• It is automatic.
• Easily operated and controlled by low skilled persons.
• It is reliable.
• Low cost compared to other elevators.
• It is movable and can travel in unsafe places.
• Used in hospitals and labs.
• Used for tracking sources.
• Used for material handling in companies.
