

Published on Apr 07, 2026
In this present work turn the steering wheel, the front wheels turn accordingly, and the car changes direction. How that happens though is not quite so simple. Well it used to be back in the days when cars were called horseless carriages, but nowadays, not so much. The steering knuckles system is where the axles themselves, which are mounted on a knuckles, out and away from the go kart, and they actually rotate around these pivots, and cause the wheels to turn by using of hydraulic single acting cylinder.
And also using Pascal’s law by moving of the hydraulic single acting cylinder. In our project we had made the system so simple by including the worm gear attachments which powers the rotation given through the steering wheel. Along with the worm wheel setup a potentiometer is included for boosting the power of rotation obtained from the steering wheel for the rotation of D.C motor so it powers worm wheel arrangement to activate at normal speed for performing the activation of the wheels for controlling of vehicle.
Wheel Steering System is employed in vehicles to achieve better maneuverability at high speeds, reducing the turning circle radius of the car and to reduce the driver’s steering effort. In most active 4-wheel steering system, the guiding computer or electronic equipment play a major role, in our project we have tried to keep the mechanism as much mechanical as possible which can be easy to manufacturing and maintenance.
This project focuses on a mechanically feasible & innovative design involving a double rack and pinion system for rear wheels enclosed within a casing, connected to the steering column by a combination of a bevel gear assembly & telescopic shaft. The movement of the rear wheels is done by the movement of the rear pinions which in turn move the newly designed spindle to achieve the required movement of the rear wheels.
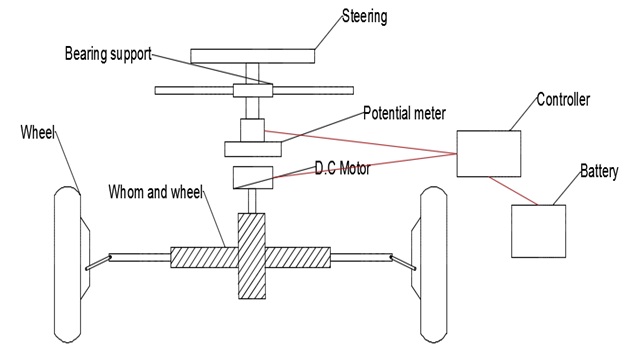
The working system consist of steering wheel arrangement which is connected to an axle by means of worm and wheel attachments the axle is linked with the wheels by means of several linkages, so the activation of the steering wheel functions the wheel to move from left to right based up the driver convenience. In order to increase its efficiency, the D.C motor is coupled with an arrangement which is powered by means of potentiometer disturbances caused by the activation of the steering wheel when the wheel gets tilted at certain angle then the disturbances is transferred to the potentiometer which boosts the rotation and tends to rotate the D.C motor at the required speed for the activation of worm wheel arrangement. So handling of this system is easy and efficient when compared to the existing one.
• The vehicle’s cornering behavior becomes more stable and controllable at high speeds as well as on wet or slippery road surfaces.
• The vehicle’s response to steering input becomes quicker and more precise throughout the vehicle’s entire speed range.
• The vehicle’s straight-line stability at high speeds is improved.
• Negative effects of road irregularities and crosswinds on the vehicle’s stability are minimized.
• The vehicle is less likely to go into a spin even in situations in which the driver must make a sudden and relatively large change of direction.
• By steering the rear wheels in the direction opposite the front wheels at low speeds, the vehicle’s turning circle radius is greatly reduced. Therefore, vehicle manufacturing on narrow roads and during parking becomes easier.
• For automobile application especially for four wheelers.
