

Published on Apr 07, 2026
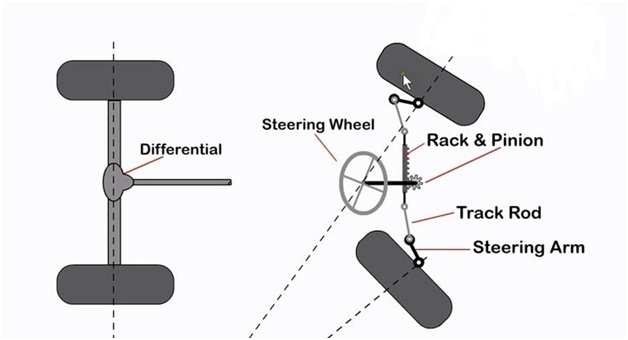
The operation of an automobile steering gear is intermittent with low angular velocities and frequent direction reversals. For a typical Rack and Pinion Steering (RPS) gear used in light vehicles, the span of movement of the rack is limited to approximately four rotations of the pinion. For this limited span of rack travel, the torque required to rotate the pinion is tested for satisfactory functioning of the steering gear.
The torque variation due to engagement and disengagement of the pinion teeth, mesh friction variation, and spring force that keeps the gears in mesh, etc., are obtained from the virtual prototype developed in Automatic Section, where, the manufacturing errors are also incorporated.
This prototype lends itself for the implementation of improvement concepts and performance testing and it is very use full for disabled person to operate the hand free vehicle by using motion of leg control.
This Project presents the control of a Hand free wheelchair particularly for indoor and outdoor usage. A virtual wheelchair model is developed using automotive components and linked with for control purposes. The goals are to have a simple, compact and stable wheelchair in order to complete the ascending and descending tasks. The challenges are to ensure the wheelchair seat always stay at the upright position and to control both the wheel motors while climbing. MECHANICAL control is used to provide appropriate torque to both wheels as well as at to the wheelchair seat during climbing. Results show that the wheelchair movement can be controlled smoothly and the seat maintained at the desired position with the adapted approach, our task is to provide a virtual position of the wheel chair in a modern mechanical evolution for disabled persons.
A special type of wheel chair is designed which can be used to ride on flat surface. So many works were done on automated hand free vehicle. Emphasis was given on solving the problem as well as other facilities provided before. Giving ease to user in different postures is another important purpose. The design presented in this paper will provide more physical and psychological advantages to the user because of scientific approaches and creativities. Our Fabrication will provide complete automatic control and higher mechanical efficiency. This limitation creates a mental stress on a handicap specially those who are handicaps by accident. These phenomena added fuel to fire in this thinking and this is why a highly efficient wheel chair is presented.
On the basis of following points:
• Strength
• Light in weight
• Simple in design
• Easy to manufacture
• Low in cost
• Reliable
• Using the Step Mill requires simple balance but significant strength. More so than other cardio modalities.
• The simple act of maintaining balance engages core muscles with every step, building strength and endurance of this critically-important muscle group.
• Low Impact
• It should be used in INDOOR and OUTDOOR purpose
